作ってみました
ランニングモデルを作ってみるぞ。
もちろん、これはウォーキングモデルにもなります。
両者共用。
歩きから走りに切りかわるさいに、マグマ大使みたいに変身するわけじゃないからです。
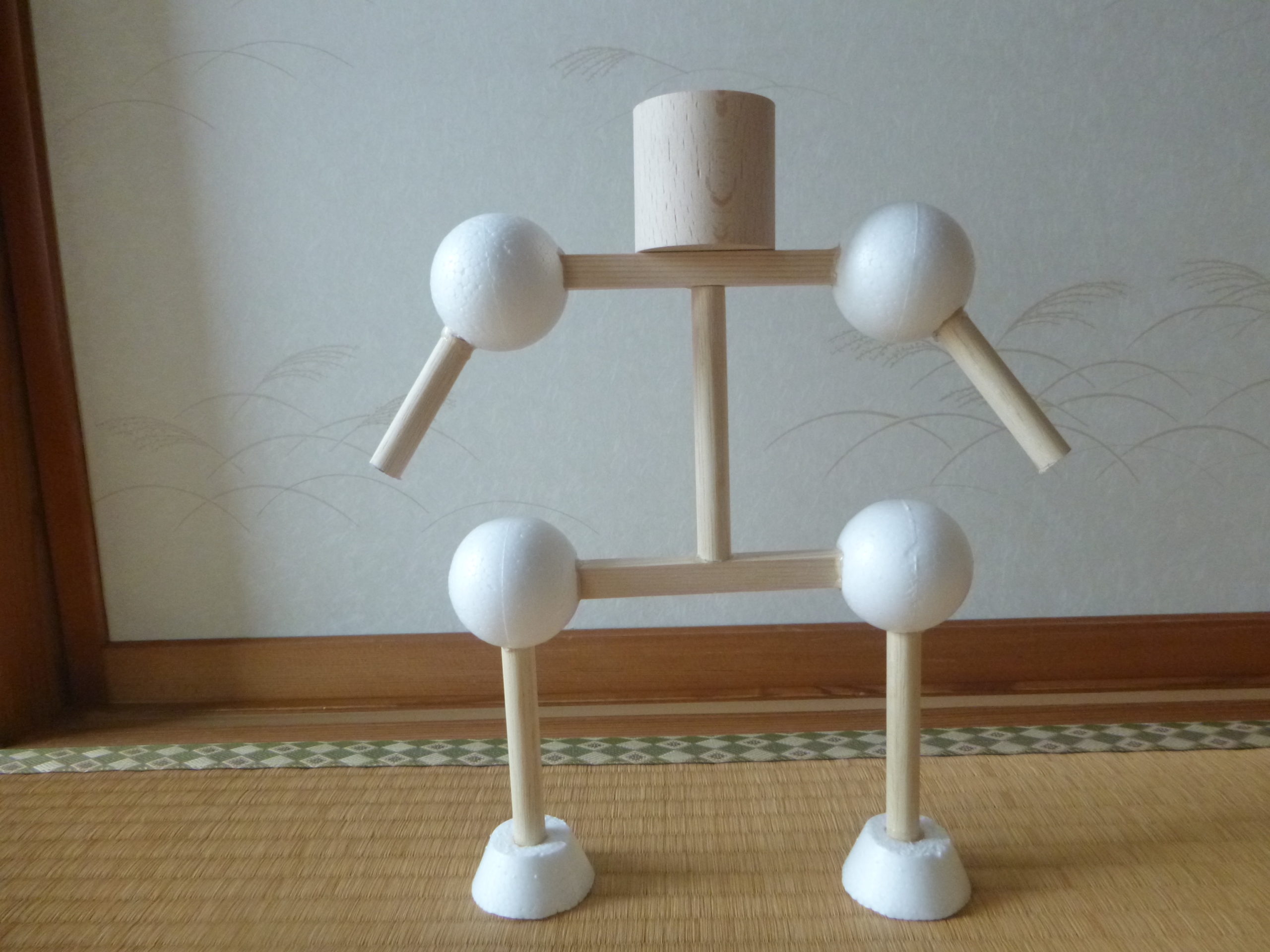
モデルの基本骨格。
着目したのは、アシとウデです。
アシは胴体と「シリ球(しりだま)」でつながっている。
ウデは胴体と「肩球(かただま)」でつながっている。
ここです、強調したかったのは。
この構想を胸に幾星霜。
ついに、ついに完成しました。
さいしょだから「1号」と名づけました。
はい、あいかわらず安易な命名法です。
サンダーバードやパーマンと同じ発想です。
とはいえ、別の選択肢もなかったわけではありません。
たとえば、一郎、二郎とか。
かわいく、一子、次子とか。
そんなものです、わたしの発想の限界。

ついに登場。というほどの迫力はありませんが。
はい、とってもチャチです。
モデルの特徴
ポイントは、ひとつだけです。
4つの「関節球」を、めいっぱい目立たせた、ということ。
これが、最大の売りです(よくいえば)。
逆にいえば、コレしかない(客観的評価)。
アシは、シリ球で胴体とつながっている。
ウデは、肩球で胴体とつながっている。
しつこく繰り返させていただいちゃいます。
発想が、とぼしい。
それにしても、素っ気なさすぎないか。
芸がないかも。
小学生の夏休みの工作レベルかな。
それも、低学年の。
何とでも、いってください。
まあまあ、そう突っ込まないで、広いココロを持ってください。
これでも、苦労したのです。
今の時代なら、コンピューターグラフィックで作れませんか?
3Dモデルだって、作れますよ。
うーん、アナログおじさんには、とうてい無理です。
敢闘賞までは、望みません。
せめて努力賞は、ほしい。
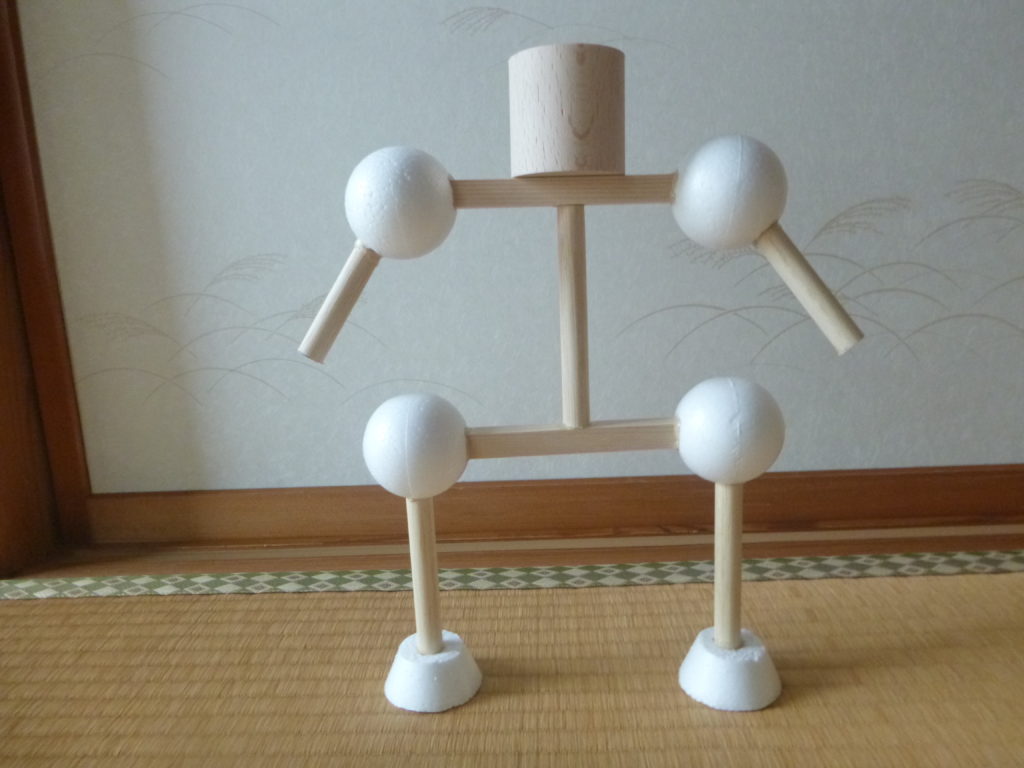
ウデとアシは、「球」で胴体とつながっています。
それを表現しようとしたら、こうなりました。
わたしの、限界?
欠点
かなえられなかった夢があります。
それは「動き」です。
勝手に、動いてはくれません。
ですから、ロボット選手権には出せません。
走るモデル、歩くモデル、といいながら、ウンともスンとも動きません。
モーターも、エンジンも、つんでいませんし。
扇風機の前におくと、倒れるくらいの芸はします。
なんだか、きょうは、言い訳の連続みたいな。
自分からは、動かない。
ならば、どうしたらよいでしょうか。
見ていただく方の、イメージの中で、動かしてください。
お客様だのみ。
とうぜん、紹介は静止画像となっています。
ですから、YouTubeにアップも意味がない?
でも、めげません。
さて、このモデル1号さん。
どのように歩き、そして走ってくれるでしょうか。
ご自身の動きと重ねてイメージしていやだけると、うれしいです。

どうやっても、動いてはくれません。
倒れる、ことはできます。
動作解説
さて、このモデル1号さん、まずはどのように歩き出すでしょうか。
イメージです。
まず、右アシが前に出ます。
具体的には、右アシのモモが上がる。
前に出た右アシは、前方で着地します。
着地とともに、上体もついてゆく。
着地したら、次は反対の、左アシが上がって前にゆく。
この、繰り返しです。
そして、両ウデに着目。
ウデは、アシの動きと交互します。
つまり、右アシが前のとき、右ウデは後方へ。
右アシ前方と同行するのは、左ウデです。
このように、4本の手足が、「球」を軸にして、胴体から動く。
もちろん、以上は、ひじょうに割り切った表現です。
たとえば、アシなら「球」部分が動くだけではありません。
ヒザも、足クビも動く。
アシ裏は、もっと複雑に動く。
でも、ポイントを押さえると、こういう表現になるんです。
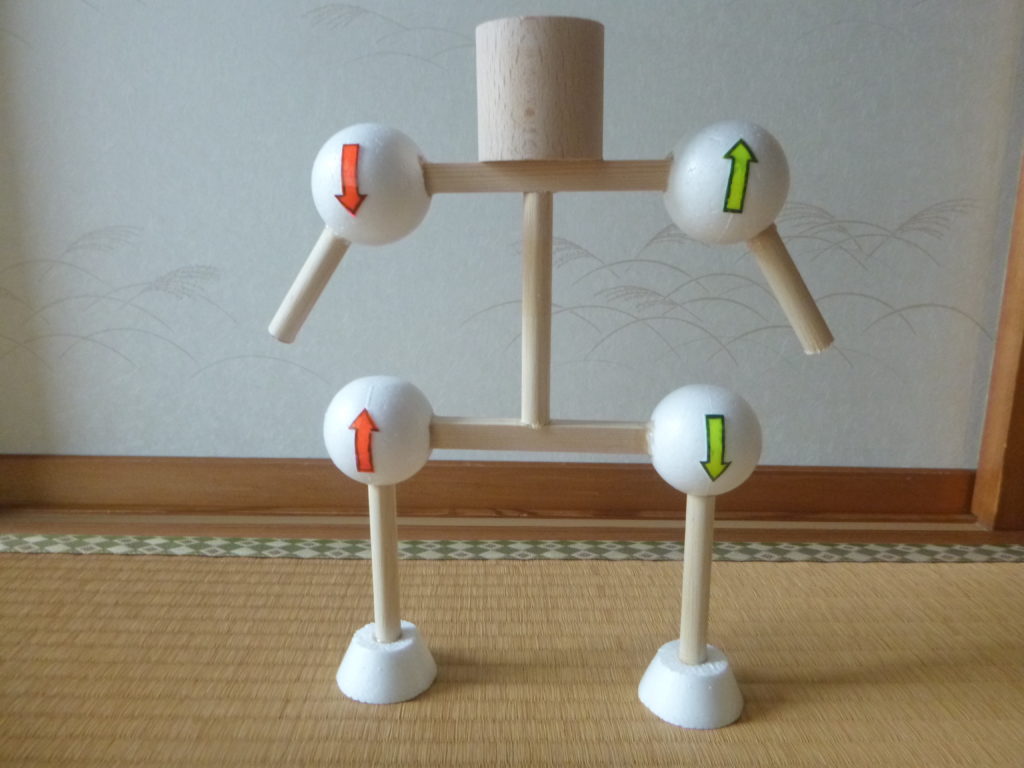
右アシが前に出たときの、4つの「球」の動く方向。
右のシリ球と、左の肩球は、上むきに回ります。
左のシリ級と、右の肩球は、下向きに回ります。
以下、交互に、「振り子」運動します。
さらに簡略化
歩き方、走り方の動作を、ぐっと簡潔化してゆきます。
ひとは、4本の手足が「前後」に動きながらすすむ。
具体的には、「4つの球」からのびた4本の手足の前後運動。
さながら、「4つの球」を起点にした「振り子」運動です。
アシが交互に前に出る。
その動きは、振り子のよう。
ウデは、アシと交互して、前に出る。
この動きも、振り子のよう。
アシもウデも、その動きは「振り子」運動。
ガリレオさんは、教会にぶら下がる振り子をみて、数々の物理法則のヒラメキを得ました。
わたくしは、歩くひと、走るランナーをみて、振り子運動に思いをよせました。
ひとの進む動きは、振り子のイメージ。
そのイメージを具体化したのが「ランニングモデル1号」です。
よろしいでしょうか。
しつこいですが、着目点は、シリ球と肩球。
そしてその球を基点にした、「前後の振り子」運動。
歩く姿も、走る姿も、こうなりませんか。
わたしに、ひとつの見解です。
(つづく)
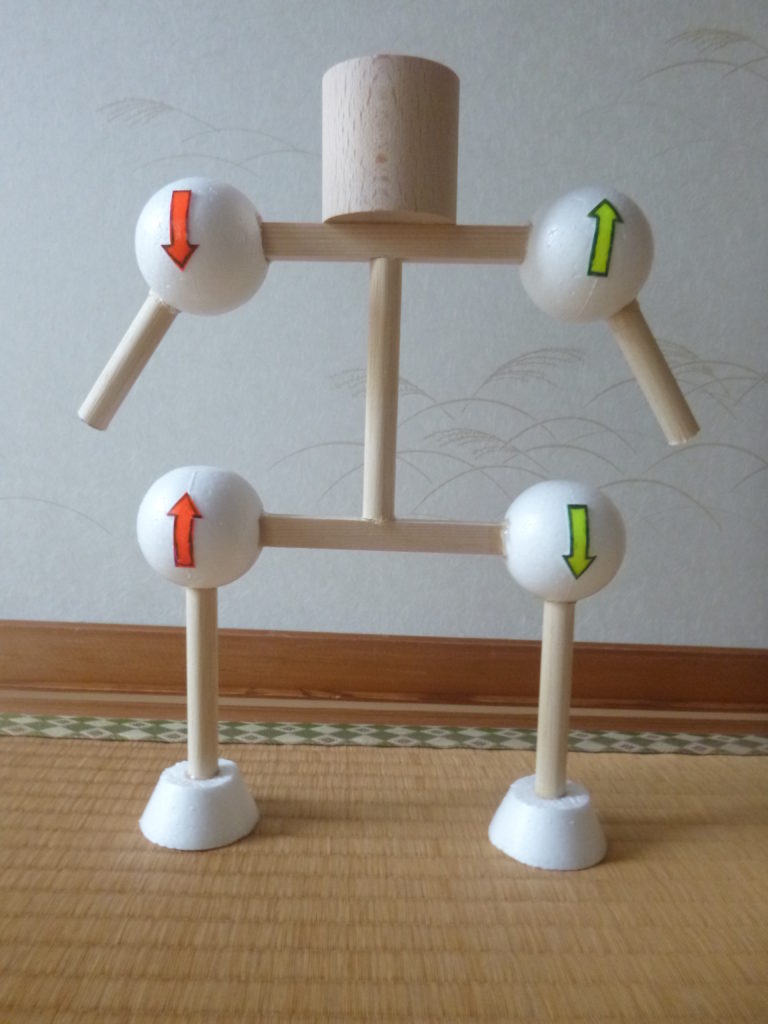
4つの「球」に着目したモデルです。
歩くとき、走るとき、この4つの球の動きに意識をむけてみてください。
ほかの方も、ここに着目してみてください。
キイワードは「振り子」です。

モデル1号 進む動作は 振り子なり
↓ よろしければ、清き1票をお願いします(1日ワンクリック有効)
にほんブログ村